
What is a line follower robot?
A line follower robot is a robot that follows a specific path drawn on the floor. We can call it a line following robot or a line follower car. In Fact this is an important milestone or project to begin anyone’s robotics learning journey.
We can make line following robots with and without arduino & coding. So let’s begin.
Which sensor is used in a line follower robot?
Usually any of the following two sensors are used to create a line following robot.
- IR sensor – Infrared sensor
- Ultrasonic sensor
An IR Sensor uses infrared light while an ultrasonic sensor uses sound waves to detect an object. Here we are considering the line as an object and tuning our sensor to follow this.
For this project, we will be using just one IR sensor to follow the line. The Ultrasonic sensor can handle more complexities and even obstacles on the way.
We are going to discuss the working of a line follower robot with IR sensor in detail further.
Line tracking robot circuit
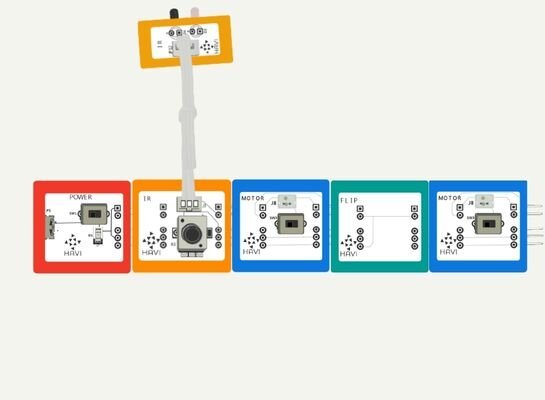
Use the following Elements out of Havi’s DIY Robotics Kits. With this, even a 7 year old can make a line follower robot without the complexities of arduino and coding. Line follower robot project can be a good choice for school science fair as well.
- Power Element
- Motor Elements (2)
- Flip Element
- IR Element pair with connecting cable
Accessories required
- Car plate
- Power bank
- Geared motors (2)
- Wheels (2)
- Roller
- Double sided tape
- Wire ties
Contact us to get these elements & accessories.
Assembly of the circuit
How to make a line follower robot?
Step 1: Making a black line path.
We can make a thick line on the floor using a dark black marker or can use black tape to create the path. The other way should also work. That means creating a white path on a black surface.
Check out the picture for a reference of the path.

Please refer to How to make a robotic car using Havi Elements or watch the following video.
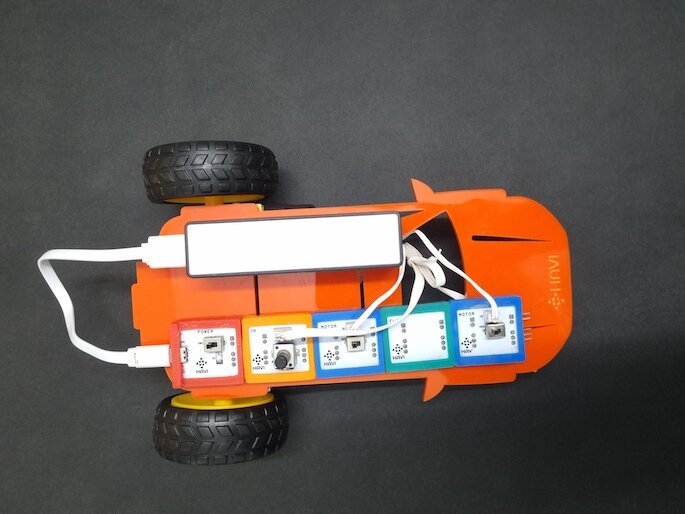
Step 3: Place the circuit
Stick the circuit on the car using DST and connect the motors.
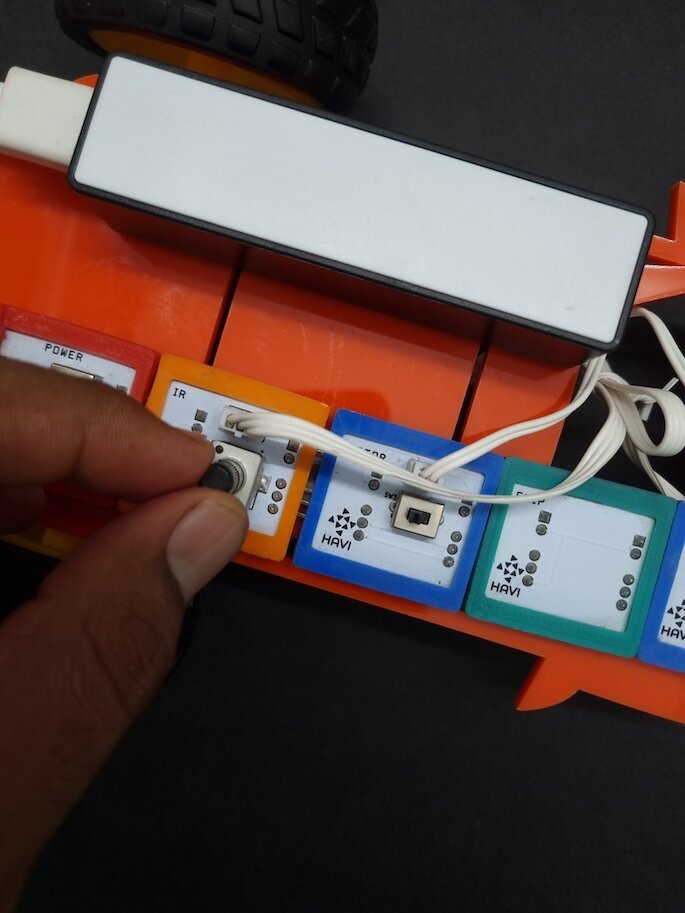
Tuning the IR sensor is the most important part of the entire line following car project. Rotate the potentiometer to tune the sensor. Place your car on the surface keeping the IR LED Element to face the black line. Keep tuning the sensor and adjust it in a way so it detects the low sensitivity and hence will start detecting only the black line.
The working of a line follower robot
We are using an Infrared sensor or IR element for this line following robot project. The sensor detects the IR light bounced back by an object to detect the object. Refer How IR sensor works to know more about working on IR Element.
Black color has a tendency of absorbing all the IR rays. Hence the receiver (the photodiode) in the IR LED element does not detect the IR rays.
We have two motor elements (and hence two geared motors) under the control of IR element.
The motor X works when IR detects an object.
The motor Y works On the Flip of IR, that means when IR does not detect an object.
When IR says there is an object, the motor X will start and Y will stop.
When IR says there is not an object, the motor Y will start and X will stop.

Let’s start with IR LED element facing the black path. In this case, the IR will say no object (since the black path absorbs the rays) hence motor Y work and X will stop.
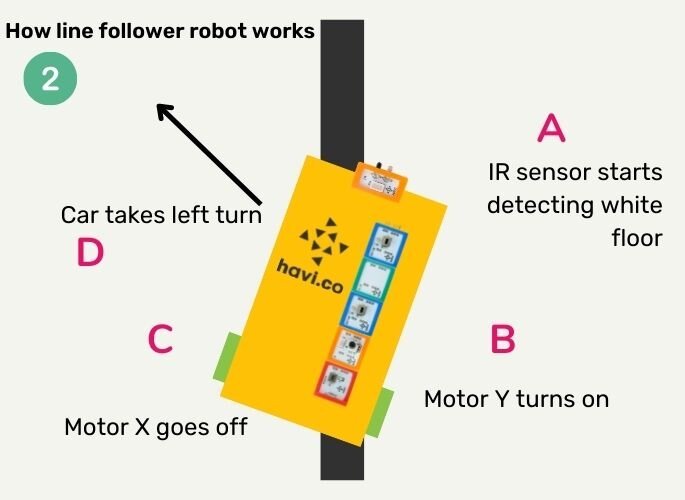
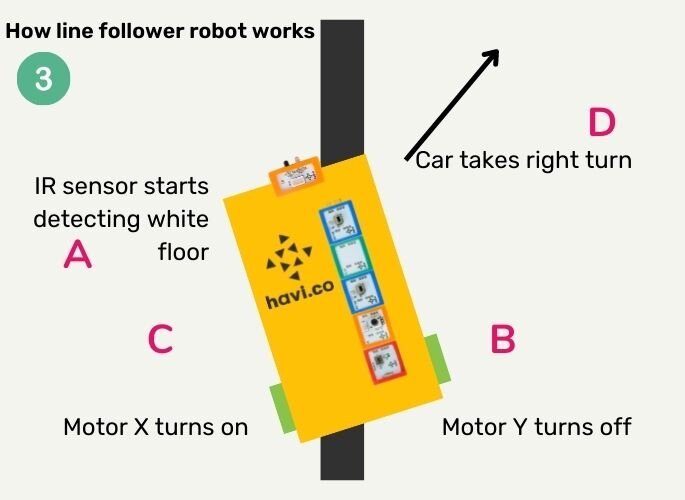
That’s how your line following robot will finish the path.
Uses of a line follower robot
There are several domestic as well as industrial applications of the line follower car. Take for example we can make a bigger line following a robot and the robot can be used to deliver medicine and food in hospitals or restaurants.
A line follower robot can be used in factories to transfer goods from one place to another, without human interaction.
This kind of robot can be useful in military applications as well.
Make line following robot using Havi’s customized pack. Contact us to know more.
Applications of Line following robot using Havi Elements
